Yue Yang
PhD Student, Department of Computer Science
The University of North Carolina at Chapel Hill
Hey there! I'm a Computer Science PhD student at The University of North Carolina at Chapel Hill (UNC-CH), lucky to be co-advised by Prof. Daniel J. Szafir and Prof. Gedas Bertasius. Before coming to UNC, I earned my Master's degree in Computer Science at Georgia Institute of Technology (GaTech), where I got to work with Prof. Matthew Gombolay and had the chance to collaborate with Prof. Greg Turk. I've been super fortunate to learn from and work with these amazing folks. Excited for what comes next on this journey!
I have a pet bird named Dora and enjoy birdwatching in my free time - you can see my sightings here.
I believe in Slow Science.
Selected Publications
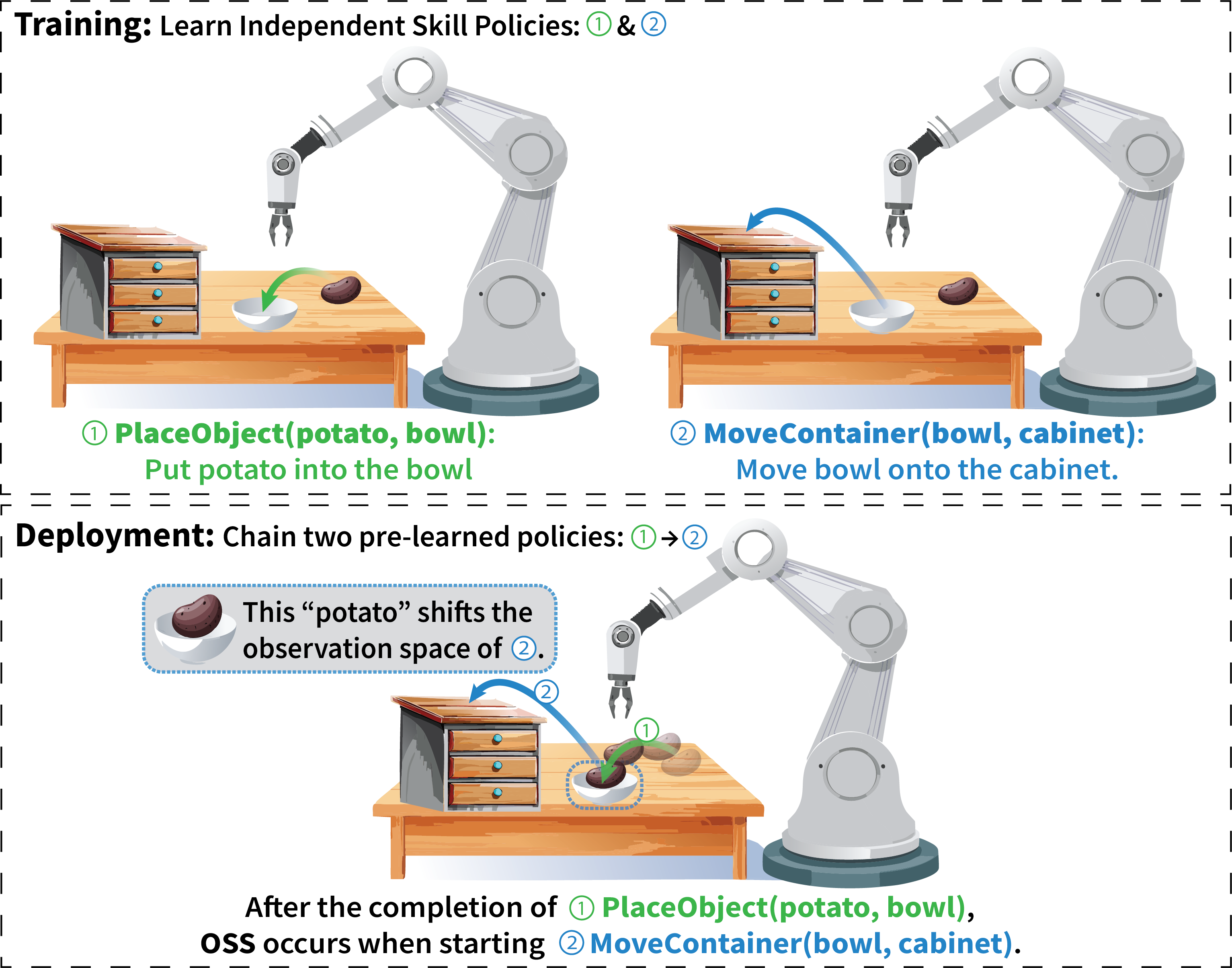
View all →BOSS: Benchmark for Observation Space Shift in Long-Horizon Task
Yue Yang, Linfeng Zhao, Mingyu Ding, Gedas Bertasius, Daniel Szafir
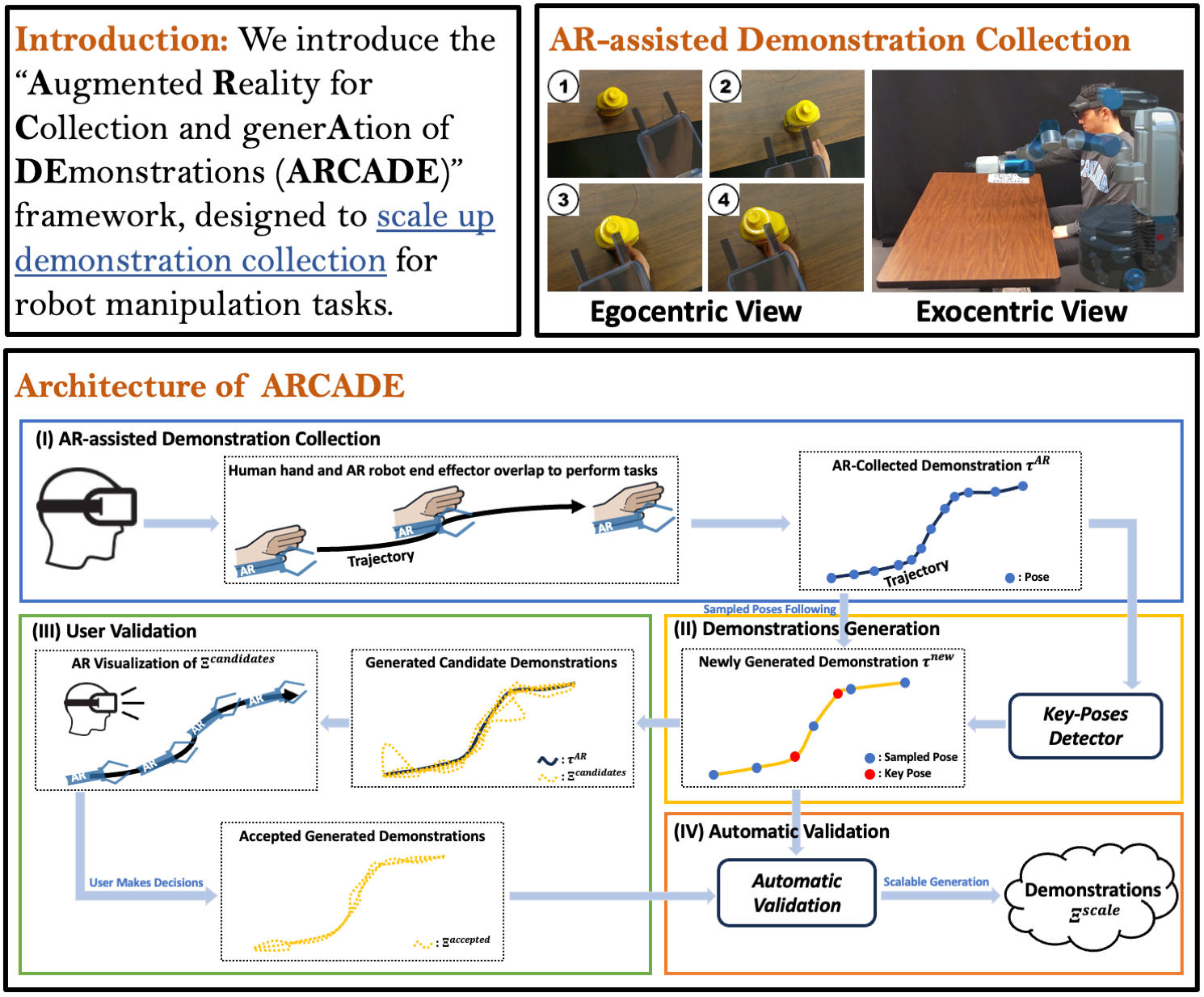
ARCADE: Scalable Demonstration Collection and Generation via Augmented Reality for Imitation Learning
Yue Yang, Bryce Ikeda, Gedas Bertasius, Daniel Szafir
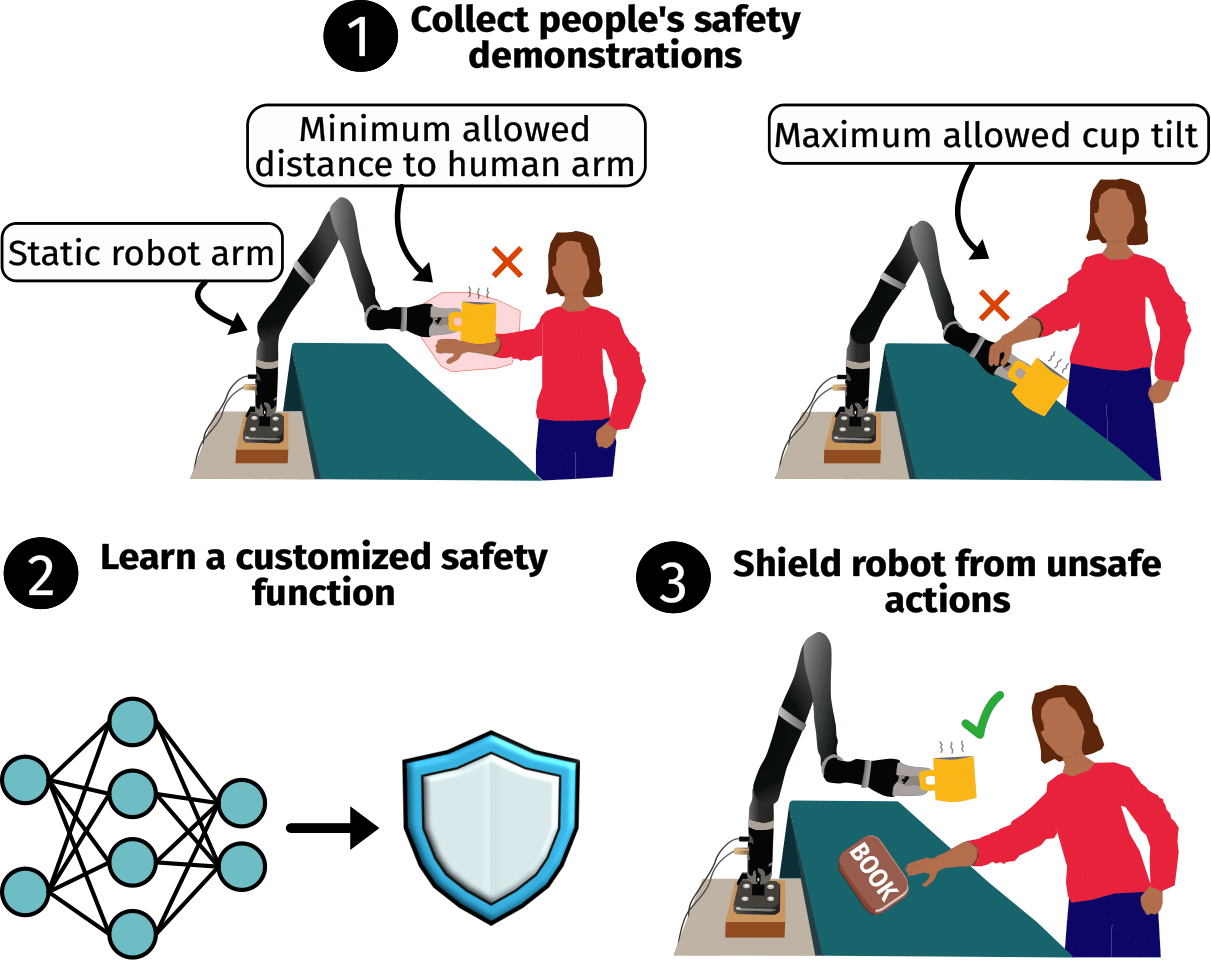
Enhancing Safety in Learning from Demonstration Algorithms via Control Barrier Function Shielding
Yue Yang, Letian Chen, Zulfiqar Zaidi, Sanne van Waveren, Arjun Krishna, Matthew Gombolay
Latest News
Internship at MERL
I started my internship at Mitsubishi Electric Research Laboratories (MERL) at Boston :0
Paper accepted at T-FR
Our paper "Competency-Aware Collaborative Robotic Surface Exploration: A Study at the Mars Desert Research Station" accepted at IEEE Transactions on Field Robotics (T-FR).
Paper accepted at IROS 2025
Our paper "Rebot: Scaling Robot Learning with Real-to-Sim-to-Real Robotic Video Synthesis" has been accepted at IEEE/RSJ IROS 2025.
Paper accepted at RA-L
Our paper "BOSS: Benchmark for Observation Space Shift in Long-Horizon Task" has been accepted at IEEE Robotics and Automation Letters.
Paper accepted at HRI 2025
Our paper "Supporting Long-Horizon Tasks in Human-Robot Collaboration by Aligning Intentions via Augmented Reality" accepted at ACM/IEEE HRI 2025.