Generate additional demonstrations by following sampled waypoints + key waypoints from the single human-derived demonstration.
To obtain key waypoints, we propose the Key-Poses Detector, which assumes that key waypoints happen in 2 cases:

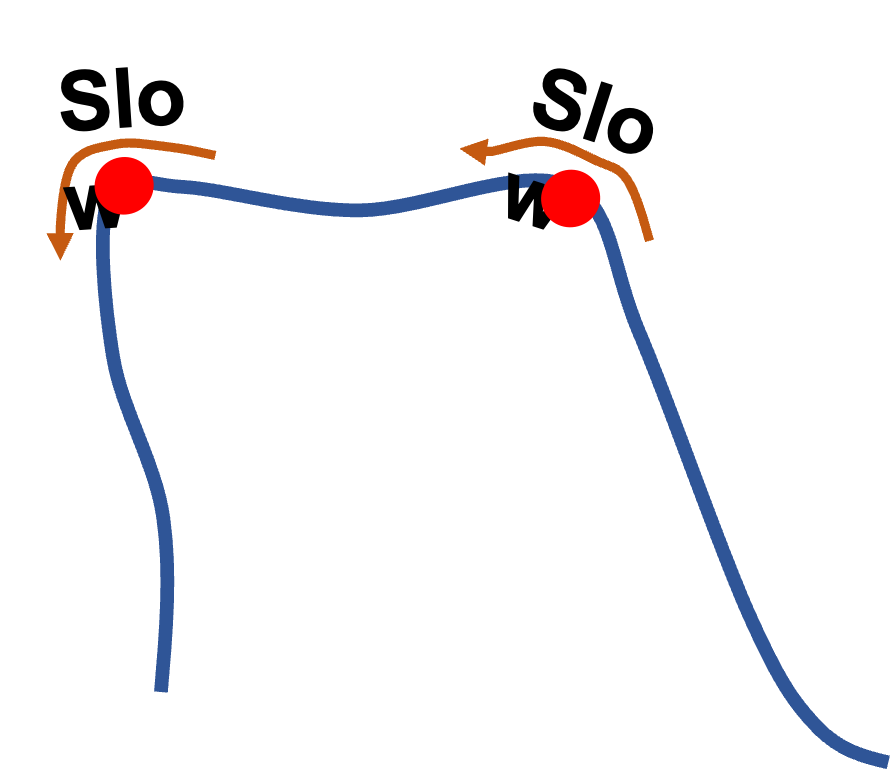
To avoid robot’s unnatural behaviors when following waypoints, we include the User Validation step where we visualize the generated demonstrations in AR and the user decides to accept or reject.
Accept case (3x speed)
Reject case (3x speed)
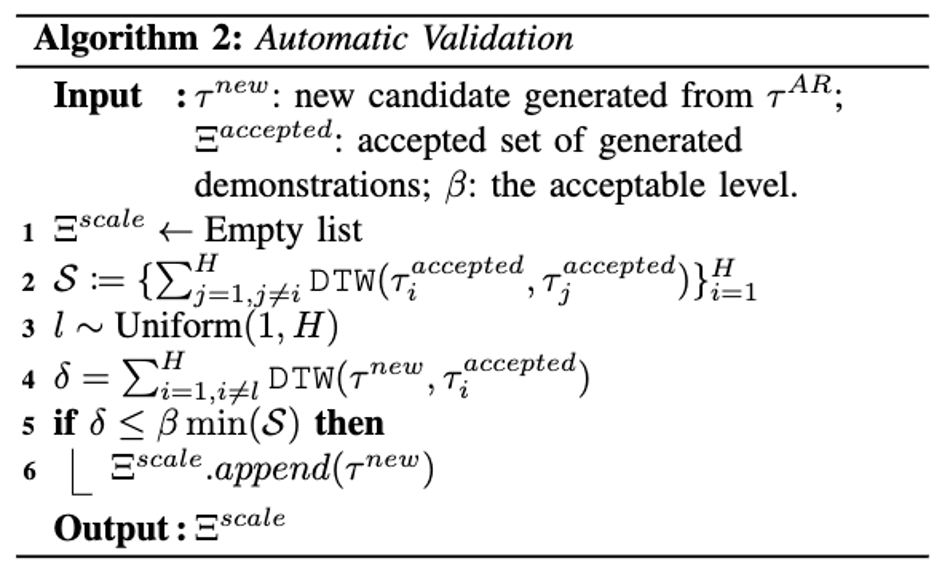
However, validating many demonstrations may still be labor-intensive, even with limited user roles. So we introduce the Automatic Validation: